Robotics – The Synthesis Project
The final project of the two year academy program requires that the students design, fabricate, program and test an autonomous robot. We have been doing this project since the inception of the program, but this year we have made some significant improvements on the project. In this post I will explain the project, and highlight those improvements.
This project is an extremely challenging task that requires successfully completing several “sub-projects”. We tell the students at the beginning of the school year, that this project is more difficult than any of the other projects – by a long shot!
“If you haven’t done everything, then you haven’t done a thing.” – Red Whittaker
We completely changed our robot competition parameters this year. In previous years we had the students design sumo wrestling battle bots. Although this was a fun project, we started to notice that some robots performed really well without really having to “think”. These robots generally lumbered around the ring, sometimes without even actually “seeing” their opponents. Through pure luck they just managed to push their lighter opponents out of the ring. We decided that we needed to change the project in order to force teams to be smarter and we also wanted to get away from a robot competition that seemed to focus on aggressive battle.
Ironically, I suppose, our robot project changes were inspired by the classic Nova film that documented the DARPA challenge known as the Great Robot Race. In this race, the autonomous vehicles raced through the Mohave dessert on a course that was revealed to the competitors only hours before the beginning of the race.
Bob set about building an impressive “maze” for the robots to navigate. The robots had to make their way through a series of 90 degree turns defined by a series of connecting corridors with vertical walls about 20 cm tall. The robots were then given two attempts to make it through the course as fast as they could.
The Brains and Braun
When we first started this project about twelve years ago, we first used a Java based board that we liked, but it was really expensive and we didn’t really need much of the hardware and software features that it offered. About eight years ago, the Arduino board was taking the Maker community by storm and we decided to hop on the Arduino bandwagon, and we have been very happy ever since. The simplicity, online community, the plethora of code examples and tutorials as well as the price have been key points in why we have decided to keep using the Arduino. This year we decided to incorporate DC motors from Sparkfun and Adafruit’s motor shield. The combination allowed the students more flexibility regarding drive train design, and also allowed for some interesting discussions around the advantages and disadvantages of servos vs dc motors. Our only complaint with the shield would be that it would be nice to have the headers pre soldered!
Designing The Circuitry
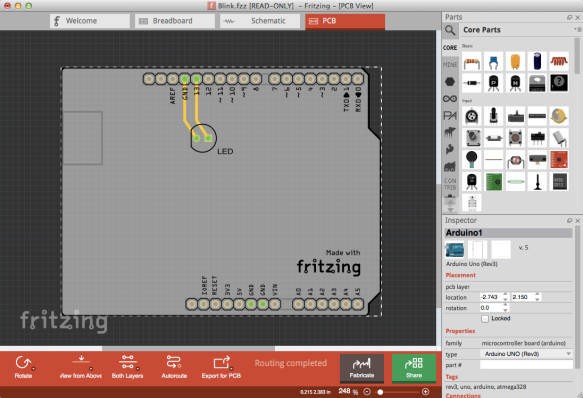
One of the major additions to the project was to require that students design and fabricate the circuitry for their robots. We did this by introducing two new skills to the project. Students had to learn how to use a printed circuit board (PCB) design software known as Fritzing, and then they had to learn how to fabricate their PCB boards using a CNC mill.
There are a number of amazing PCB design tools out there – and many are free! They all have their strengths and weaknesses. Here is what we found out as we did our research to find the right tool.
Autodesk’s Circuits is great because its web based, super easy to use and has an amazing feature where you can actually simulate the circuit. You can add a virtual voltmeter of ammeter to your virtual circuit and then with a push of a button, you can get virtual readings on the meters. I found this tool to be amazing for teaching circuitry and I allowed the students to use it as a “key” for their worksheets. It also has the ability to simulate an Arduino too! You can add an Arduino to your project, connect up LED’s, servos, etc. and actually see them light up or rotate as you change the code. It is a bit limited in that it doesn’t support most added libraries, but it is still amazing. We eventually decided not to use it for PCB design because it is unfortunately a bit clunky and doesn’t allow for much customization of the board.
Eagle is of course one of the most advanced and feature rich PCB design tools out there. It is also very complicated. IT of course offers the largest toolset, complete control of the design process and the free version is as close to a professional tool as one could hope for. The problem is that all these features come at a price – complexity. If we had an entire year to spend on this project, I might have decided to go with this tool, but we needed something that the students could learn quickly and weren’t going to get frustrated with…
Fritzing is a free, open source “beta” software that is very similar in look and feel to Autodesk’s Circuits – in fact I think Autodesk’s product must have been inspired by Fritzing? Although Fritzing lacks the amazing simulation tools that Autodesk Circuits has, it does offer a much better PCB design environment. The options that are available for editing the component foot prints, the PCB attributes, etc. make it really nice to work without making the tool too complex. This is the tool we decided to teach and use in class, and the students liked it.

Fabricating The Circuitry
Back in the fall we decided to invest in a small CNC mill produced by a local company out of San Francisco named Other Machine Co. This machine, called the OtherMill has been an amazing addition to the lab. With this machine, we have been able to teach the students how to fabricate their own PCB’s. The OtherMill is not just for PCB fabrication, in fact we have used it to mill small aluminum parts as well.
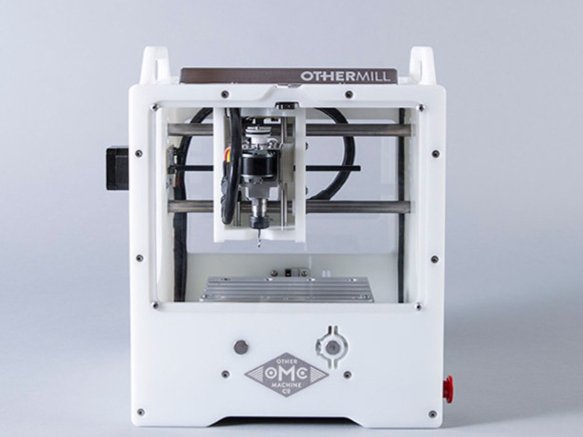
This micro CNC desktop mill is super easy to setup, really easy to use and plays really nicely with Fusion 360 – our 3D CAD and CAM software. I was incredibly surprised and pleased by how easy it is to learn the operating software – known as OtherPlan. The company has a great support website full of great tutorials, and we were able to teach all the students how to use the machine in just a few days.
The PCB files generated by Fritzing (we exported them as Gerber files) worked flawlessly with the OtherMill, and within a very short period of time, all the students had designed and fabricated single sided PCB boards for their robots.

The Final Results
As with any major changes to a project, there are lessons to be learned. We realized that the task was rather complicated and many of the students did not make it as far through the course as they had hoped. It was clear however that this competition proved more interesting from the perspective of getting students to see the importance of software design. Not only did we see very different software strategies, but the variance in hardware design was surprising. They really had to think about how the hardware and software had to work together, and they had to think about optimization. This was a clear advantage of this competition over the previous year’s competitions. Students spent far more time trying to figure out how they were going to shave time off their attempts, and how they were going to adjust software and hardware to better navigate the course. From our perspective, the changes to the project proved to be fantastic, and we are looking forward to improving on the project design for this year. Some of the things that we are going to do this year is introduce some different sensors for the students (like “feelers”) and also give them a price list and budget so that they have more hardware choices.













