Rotational Dynamics Are Difficult to Learn… and to Teach
One of the most difficult units for AP Physics students is rotational mechanics. It can also be one of the hardest to teach. With that said, I really like rotational mechanics, but I want my students to enjoy it more. I want them not be be bogged down in some of the more difficult theoretical aspects of the rotational motion. There are several reasons for this topic being challenging I think – the use of the polar coordinate system, the introduction to the concept of a distribution of mass as opposed to just thinking about objects as point particles, the cross product of vectors producing a result pointing in the Z axis…yikes, it can get pretty heavy.
As a teacher, it is also tricky to come up with good investigations that allow students the opportunity to explore rotational dynamics. They do exist, and some are really good, but I also think that many don’t exactly build a strong link between the conceptual and mathematical models. Rolling a ring and a disk and sphere down a ramp can be a great demonstration that things that roll certainly do not behave like blocks or carts moving down a ramp, but its hard for the students to explore further – to build a predictive model that is mathematically precise. The normal way of things is to jump into the math and reveal the underlying mechanics through fairly complex derivations.
Simulating The Angular Momentum Principle
This year I decided to turn to a computational approach. I wanted the students to computationally experiment and discover the fundamentals of rotational mechanics. In order to do this, we started from the Angular Momentum Principle. This is the approach used in the wonderful textbook Matter and Interactions:
Στ ·Δt = I·Δω
The idea here is simply that a torque acting on an object (that is free to rotate around a pivot point) for a specified amount of time is going to cause an object to experience a change in its rate of spinning – called its rotational velocity.
Simulating A Physical Pendulum
Having the students start with this principle, they could learn some interesting mechanics of rotating bodies by building a simulation of a physical pendulum. A simple pendulum is “simple” in that it represents a single point mass hanging on a massless string. A physical pendulum has physical dimension, and so the body has to be modeled as having a distribution of mass. This gets really tricky to analytically model – especially the time dependent functions describing its motion.
But with a computational approach students could easily apply the momentum principle frame by frame. The students in my class were able to create a simulation of a physical pendulum in just over one class period. The pendulum that they modeled was a bar with weights at either end. The weights had different masses so that the bar would swing.
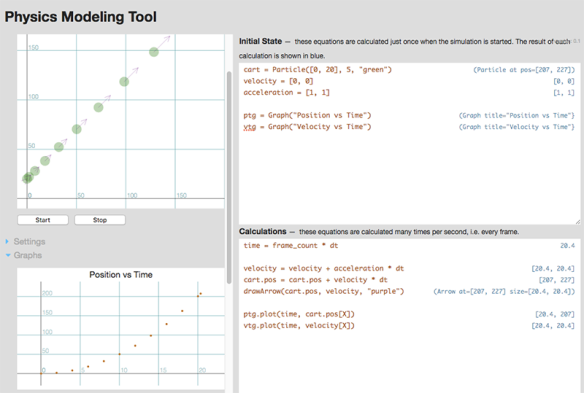
https://tychos.org/scenarios/250
The students set about building their simulations in Tychos – a web based simulation builder. As the students coded the simulation, they were continuously engaged in discussions about the mechanics of the code and the mechanics of nature. I asked the students to change the masses, or change the length of the bar, or the mass of the bar. They would run their simulations and discover that something didn’t quite match what they thought should happen. Students would then look for errors in the code, or they would question their own assumptions about the physics involved.
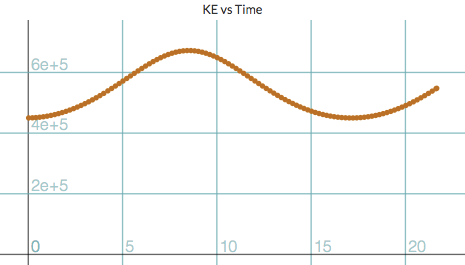
When they finished their simulations, and they were confident that their simulations were working, I had the students then use the simulation to investigate the energy of the rotating system. After some discussions about the transference of energy from the gravitational field to the kinetic energy (rotational) of the bar and the weights, the students discovered that their simulations also seemed to model the conservation of energy.
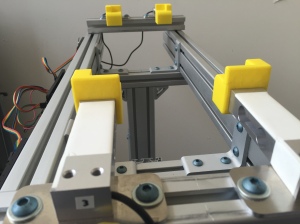
We didn’t stop there though. We had to see if the simulation did indeed match reality. This is called deployment in the modeling pedagogy. Using a meter stick, some disks that I had made for an earlier investigation, and a Vernier rotational sensor, I constructed a real physical pendulum.


To test the simulation, students were asked to identify all the inputs that would need to be measured and then entered them into their simulations. The students then used the conservation of energy to calculate rotational speed of the bar when the bar was released from an angle of 60 degrees – with the heavier weight above the lighter weight.
The students calculated a final rotational velocity of 2.8 radians/second. We then ran our test and graphed the angle of the bar as well as the rotational velocity of the bar (see graphs below). They measured a rotational max velocity of about 2.6 radians/second. The students were pretty satisfied with this result.
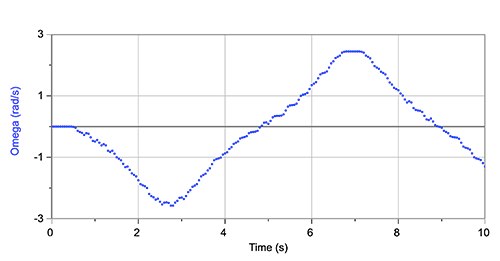
angular velocity of the bar
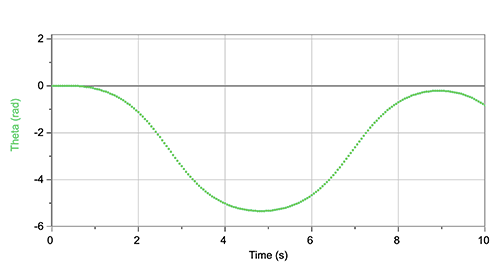
angular position of the bar
I then had the students graph the results of their simulations, and it was quite satisfying to see that the simulations and the sensor readings were matching really well.
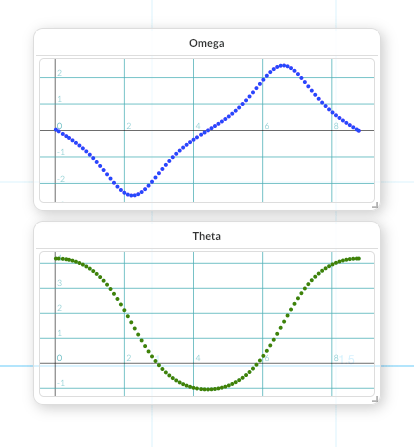
graphs produced in Tychos
This led to some more interesting discussions around simulating axel friction and air resistance. We also discussed the shapes of the graphs and what might be going on with their mathematical structure. This was far more interesting than just having them read out of a textbook and then solve some problems on paper, and my guess is that the students gained an understanding of the physical mechanics by having to debug their own simulated mechanics. They were able to investigate errors in their own code, but by doing so, see how the position of the weights, and the masses and the angle changed the behavior of the simulation and the motion graphs. I think the students also really enjoyed this approach, and based on how they were talking about their simulations and the experiment, they demonstrated to me that they had grasped a deeper understanding of rotational mechanics.