The model rocket project has long been a favorite at the Academy. For the past fifteen years, students have designed, fabricated and then launched model rockets as the first project of the program. Over the years, I have tweaked the project several times, each time finding new ways to introduce authentic analysis in the process.
This year I have taken a deep dive into computational modeling, and as part of the rocket project, students were asked to create a simulation of their rocket prior to launch. In this post I will discuss how I did this, and how it turned out.
Simulating The Momentum Principle:
Prior to getting started on this, students investigated the causal relationship between forces and changes in motion. Using force sensors, carts, weights and elastic cords of different lengths, students began building a qualitative and quantitative model relating the momentum of a particle to the forces acting on the particle.
In previous years, I waited to introduce momentum until after a significant amount of time was spent on forces, balanced and unbalanced. This year I decided to go directly to momentum. This is a bit of a break from the established modeling instruction sequence, but I think its a good alternative that is also suggested by the great textbook Matter and Interactions. The momentum principle can easily be modeled computationally and I think the students are able to grasp it conceptually.
I have included a link to a Google Doc that is the introductory activity that I created. My approach here, as it has been with this entire unit is to give the students guided questions that allow the students to discover and investigate the code required to simulate the momentum principle. This is my first attempt, and I am sure it will undergo many revisions:
Simulating The Momentum Principle
Introducing Conditional Behavior
One of the really great things about building a simulation of a rocket has three distinct phases of its trajectory – the thrust phase, the cruise phase and the descent phase. This gives the students three different phenomena to study and simulate: positive acceleration when two unbalanced forces are acting on the rocket during the thrust phase, free fall when the fuel runs out, and then constant velocity when the parachute has been deployed.
In order to simulate this, students needed a way to change the forces acting on the rocket at different time intervals. This is done using a conditional statement:
If This Then That
Conditional statements are very easy to create in Tychos – but they work a bit differently from other programming interfaces. Here is an example:
# The thrust force - F (thrust, rocket, fuel) Ftrf = if (t < 1.8, [0, 6], [0, 0])
In this code snippet, a force is given a different value based on a condition, in this case whether the time in the simulation is less than 1.8 seconds. If it is, then the force is given a positive 6 value in the Y direction, and if the time is greater than 1.8 seconds, then the force becomes zero.
This allows the students to simulate the thrust phase of the rocket by having the thrust force disappear once the fuel has run out. We conducted tests on Estes C6-5 rocket engines in order to establish the time value. You can read more about how we did this here.
The students did the same thing to figure out when the parachute should deploy. Again this was established based on information from Estes as well as our own tests.
Comparing Simulation Data to Real Data
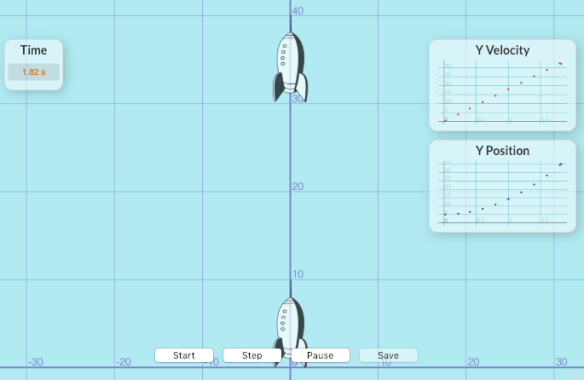
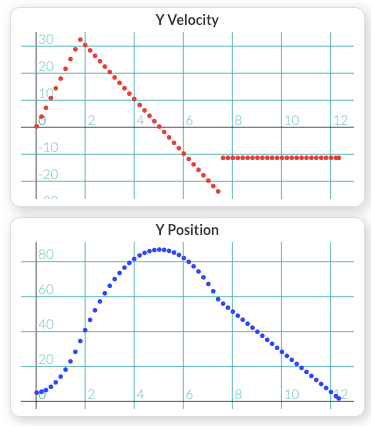
The students could analyze the simulated rocket behavior by using the graphing tools in Tychos. The students graphed the vertical velocity as well as the vertical position of their simulated rockets. Here is an example of what those graphs look like:
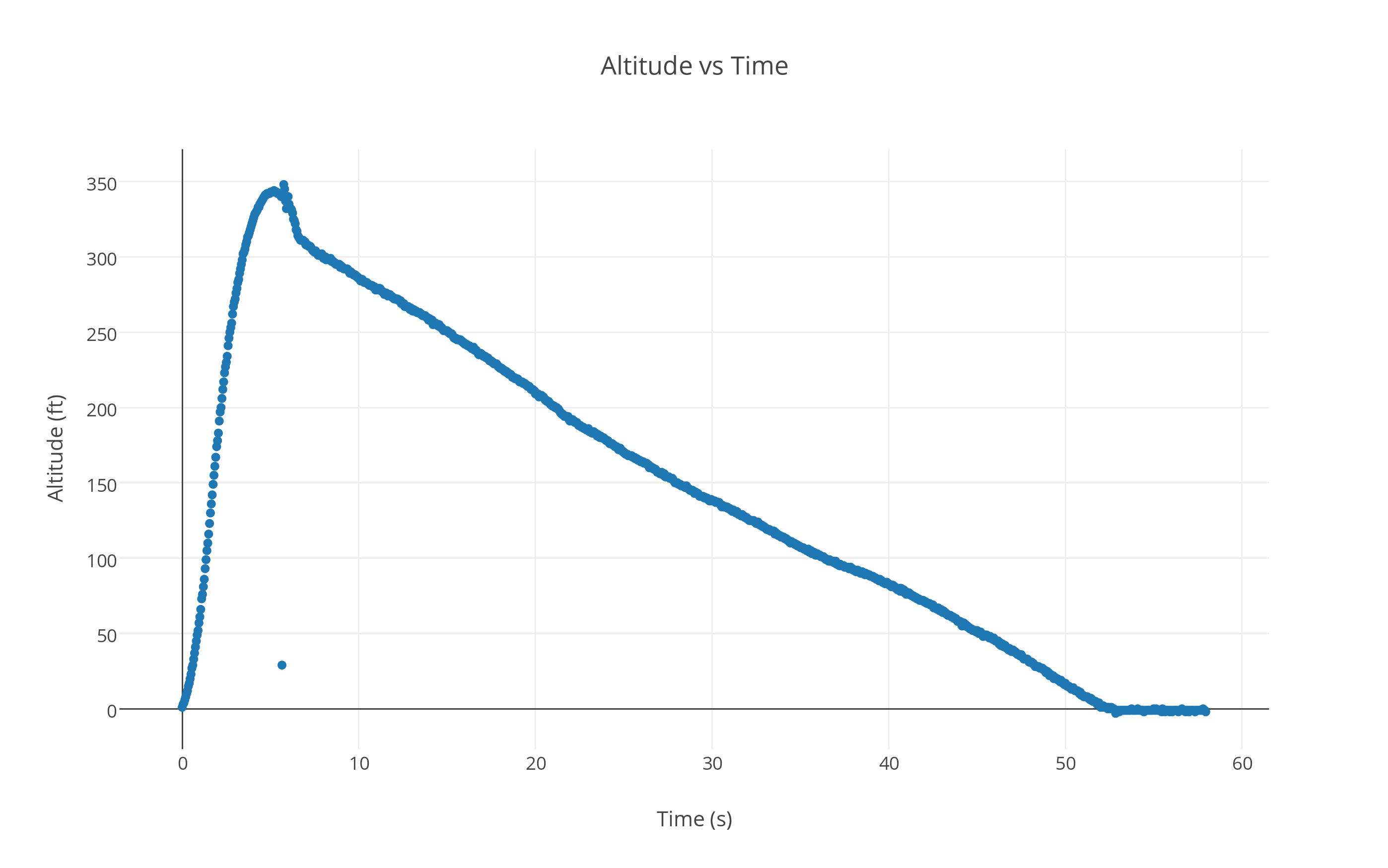
The last step of the process was for the students to compare their simulated data to the real data that was captured by the altimeter that we use in the rocket’s payload. Below are two images of the graphs of the data they retrieved from the rocket’s altimeter:
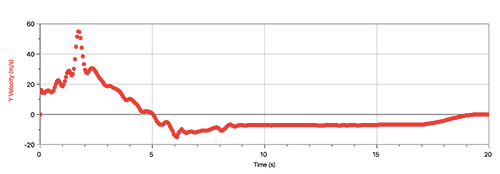
velocity data from altimeter – imported into LoggerPro
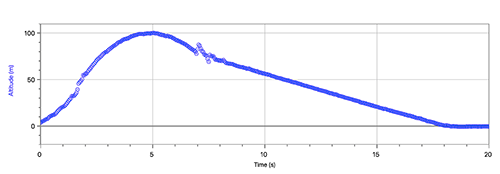
altitude data from altimeter – imported into LoggerPro
The shapes of the graphs from the simulated data and the real data are very similar! That was certainly exciting to see that the simulations were at least giving results that qualitatively matched the real behavior of the rockets.
Two factors that certainly created significant discrepancies between the real rockets and the simulated rockets was the existence of air resistance on the real rocket, and the fact that the real rockets didn’t always go perfectly straight up! We plan on modifying the simulations, but that will have to wait for a future post.