
From “The How” to “The Why”:
One of the three projects that the students will complete this year is a custom designed and fabricated rocket. One of the requirements of this project is for the rockets to carry a small solid state altimeter that collects vertical position data. This year I decided to give the students some data collected by last year’s students. Here is what the data looks like from one typical altimeter reading:
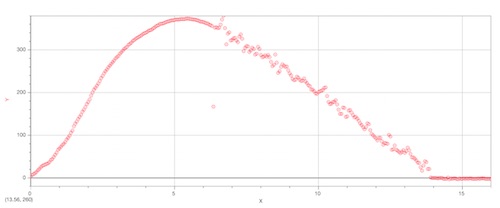
As an introduction to this next model, I presented them with the data and asked them to use both the Constant Velocity Particle Model and the Constant Acceleration Particle Model to describe the motion of the rocket based on the data. Students responded to several questions that I created and they posted their answers through the Learning Management System we use.
A Simple Definition, A Simple Representation
The student investigation teams were then asked to draw velocity vs time graphs on their whiteboards. I was impressed to see that most teams were able to interpret the position data and create a velocity graph that agreed with the data. There was some debate about the graphs, but the students worked through these differences and came to consensus around what the graph would most likely look like. At this point I was thinking about using LoggerPro’s ability to graph the derivative of a data set, but decided that I would leave that for a later date, though next year I might do it earlier.
I then introduced a very basic definition of a force:
“A Force is A Push or A Pull”
And then I proposed that we could represent the force with an arrow, just as we had done with velocity and acceleration. I then asked them to divide the rocket data into four sections based on the answers to the questions we had discussed. The students then drew a representation of the rocket in each stage and the forces acting on the rocket. The stages the students identified were 4) on the ground, 3) descending by parachute, 2) going up without fuel, and 1) going up with fuel. I asked them to draw the diagrams by starting at the end. Here is a typical example of the force diagrams the students drew:
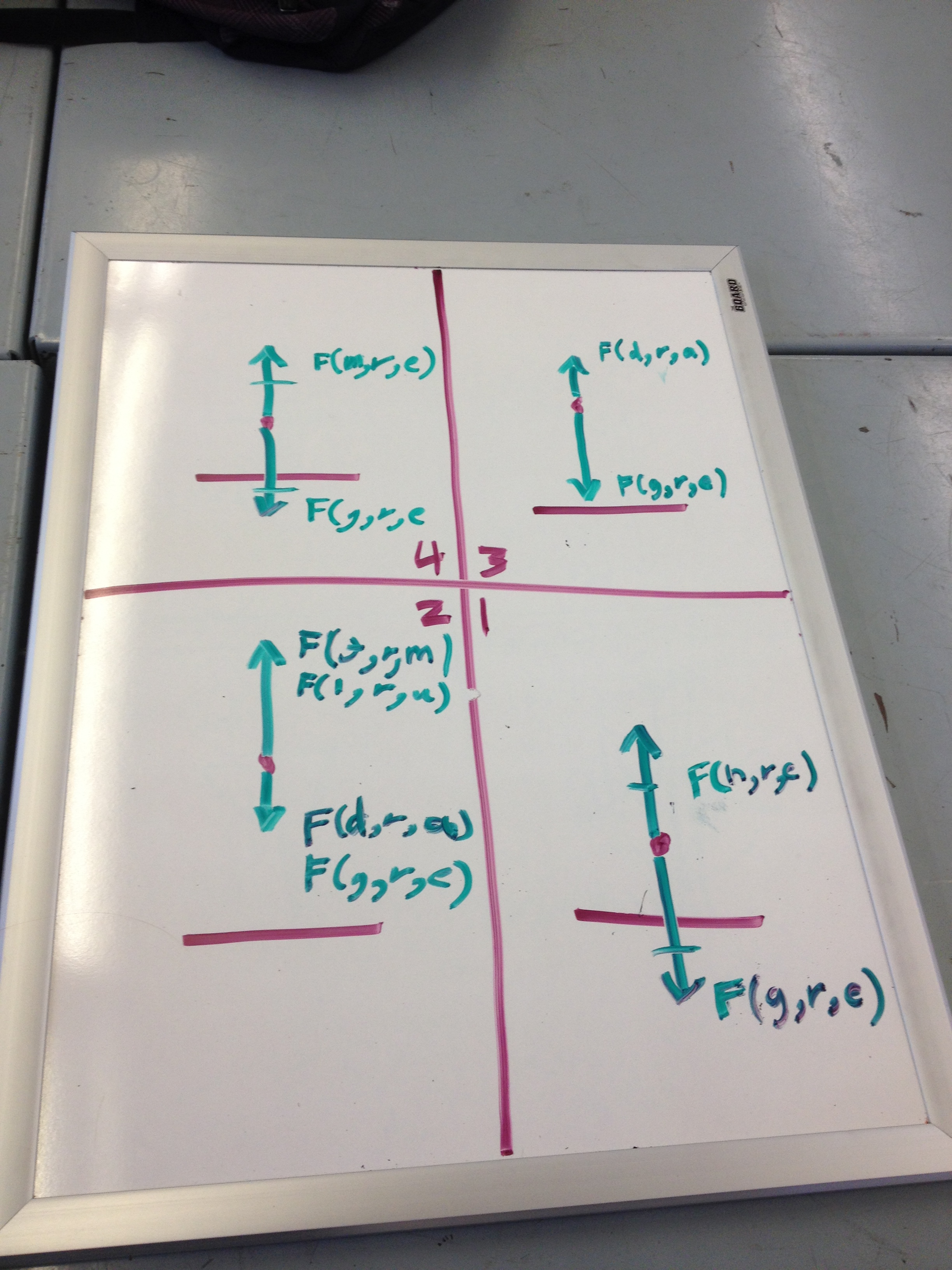
The labeling is a standard that is outlined in the Modeling methodology – it reads (type, feeler, dealer).
Constant Velocity Motion and Net Force
We started the class discussion by looking at the forces acting on the rocket when the rocket was on the ground. Students agreed unanimously that there were two forces acting on the rocket – one down, one up – the gravitational force and then the force from the ground. Great. Then on to the descent phase. Certainly less unanimity here. The students again agreed on the number of forces – two – one up from air resistance, one down from gravity. The students quickly got into several back-and-forth arguments about the length of the force vectors. The class was split. Were the forces equal? Or, was gravity “winning”? The big stumbling block was around the question, “if gravity was equal to the air resistance force, then why was the rocket still falling”? A classic example of Aristotelian thinking. I encouraged them to ask the question – “if gravity was winning, why wasn’t the rocket speeding up?” One student proposed that maybe the force of gravity was just ever so slightly larger. Some students pounced in this. They argued that the forces weren’t equal at first, but as the rocket (with parachute) descended, the air resistance force strengthened and eventually became as strong as the gravitational force. the reason the rocket didn’t slow down was because it was already moving when the forces became equal. Awesome. Then a student gave an excellent description of a thought experiment where a box was traveling through space in one direction and convinced the students that the box would not slow down if you pushed equally on both sides of the box. Students reached consensus – the rocket moved at a constant velocity because the forces were equal.
The “Residue” Misconception
We then progressed to the next stage. Things got really interesting. Without exception, ALL the student groups identified an arrow pointing upward, even though they all agreed that the fuel had run out. The question that I think cuts through this the quickest is to ask “who is pushing on the rocket upward?” Most students get that funny look on their faces as their brains begin to realize that they just ran into a logical conundrum. Some students start to respond – “the rocket pushes the rocket.” OK, how? What kind of force is it? A contact force? How does it push or pull itself? The students at this point began to question each other and the room erupted in arguments. Being a bit of a control freak, I’ve had to learn to allow space and time for these chaotic moments, but also realize the importance of catching the class before it descends into something less productive.
At this point, one group erased the upward force. I asked them why they had done this. They responded that they didn’t think a force was needed for the rocket to continue upward, and that gravity and air resistance were slowing the rocket down. This seemed impossible to some of the students. They asked – “but something is left over after the fuel runs out, isn’t there?” The class began to divide up into those that now believed the rocket no longer had any upward force acting on it and those that believed there was some kind of “left-over” force, what I call a “residue”. So, once again, I asked them to identify the dealer of the residue force. The answer is generally – “the fuel”. Ah, but hasn’t the fuel run out? Yes, but the rocket has gained something from the fuel and now that is what is pushing it upward.
This is not such a wild idea, and in fact is not that far from the idea of Kinetic Energy. The students that were in the “no upward force” camp started to explain to the other students in the class that the fuel had “given” the rocket its upward velocity, but now that the fuel was gone, the rocket was now slowing down. We discussed the idea that anything that was slowing down must be experiencing a force pushing in the opposite direction of its velocity. We returned to the thought experiment with the box floating through space. The students debated about whether this box would slow down if the force that had gotten the box moving in the first place disappeared. The students agreed that if there were no forces acting on it to slow it, then it was reasonable to say that it would never slow down. Students then agreed the rocket was no different. It didn’t need a force to continue moving at a constant velocity, but that if it was instead accelerating (in this case in the negative direction) then it would need a force, which was provided by gravity and the air resistance force. The students began to coalesce around the idea that if a force was a push or a pull, then the rocket that had run out of fuel was not getting pushed any longer, and that although it was moving upward it was indeed accelerating downward.
Making Some Observations
During the next class, I had the students set up a motion detector on one side of a Vernier dynamics track and use a force meter to pull on a low friction cart. They were to also record the velocity of the cart while the students pulled twice in quick succession on a string connected to the cart and force meter.

The students then shared their graphs with the rest of the class:

This experiment is meant to re-enforce some of the arguments made during the previous class. The students quickly see that the velocity is measured to change when the force is applied and that the velocity is “constantish” when no force is applied. The students were ready to tackle how the force and acceleration were quantitatively related, but that’s for another post…


